
『令和5年度 臨海副都心における自動運転技術を活用したサービス構築に関するプロジェクト』が決定しました!
臨海副都心エリアにおける自動運転技術を活用したサービス構築に関するプロジェクトを、企画提案により公募し、審査を経て、都有地1件、公道2件のプロジェクトを選定しました。
今年度も昨年度と同様、都有地と公道の両方を対象とし、自動運転移動サービスの事業化に向けた課題の抽出や移動ニーズの分析等を行い、自動運転サービスの早期実用化の促進を目指します。
選定プロジェクト
都有地|【テーマ】2025年の自動運転サービス実装に向けた運行方法の最適化とサービスモデルの検証による、シティバリュー向上プロジェクト
【プロジェクト実施者】WILLER株式会社 BOLDLY株式会社
実験車両イメージ(ARMA)

実験車両イメージ(ARMA)
主な実施概要
・自動運転サービスの実装に向けた歩車混在での運行方法及び新たなビジネスモデルを検証
・エリア内の回遊性を高め、自動運転移動サービスについての社会受容性を高める取組みを検証
実験車両概要
・NAVYA社(フランス)のARMAを使用
・自動運転専用に開発された完全電気自動車
・自動運転モード/手動運転モード(コントローラー)での走行が可能
検証内容
・回遊性向上の検証【事業性】
・歩車混在空間での受容性醸成【社会的効果】
・貸し切りバスのビジネスモデル検討【事業性】
実施予定時期
令和5年6月30日から7月9日までの間で、平日6日、土日祝日4日の合計10日間
実施予定箇所
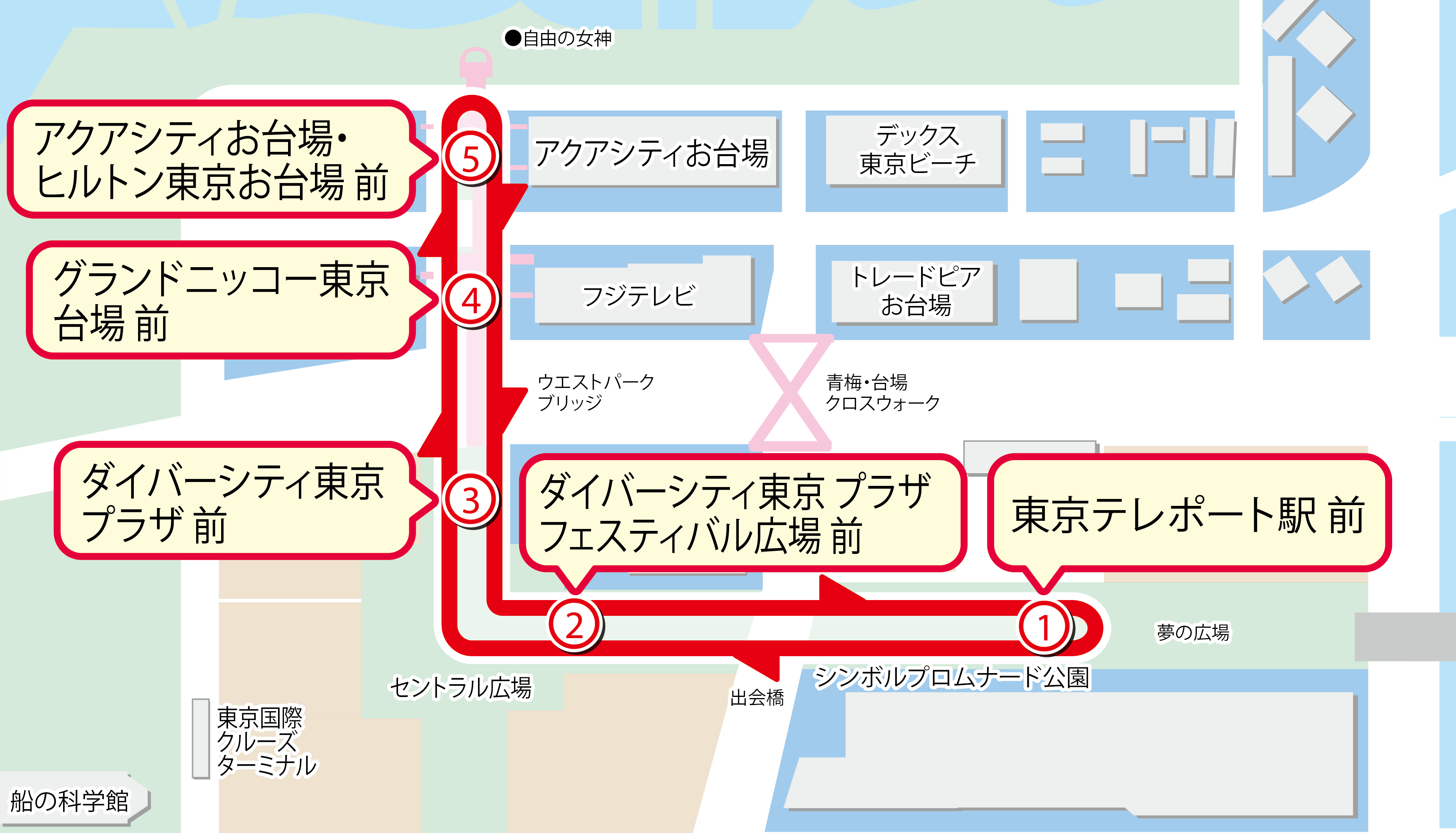
臨海副都心エリア シンボルプロムナード公園内
走行ルート
公道①|【テーマ】 臨海副都心の“環境”、“科学”、“文化”を先進技術で繋ぎ、発信する
【プロジェクト実施者】先進モビリティ株式会社
実験車両イメージ(J6)

実験車両イメージ(J6)
主な実施概要・検証内容
本プロジェクトでは、ビジネスモデル及び技術的検証を実施
①ビジネスモデル検証
自動運転バスに対する社会受容性及び2025年の事業化を見据えたルートにおける需要及び妥当性を検証
②技術的検証
想定ルートにおける自動運転バスの導入に係る技術的課題を検証
実験車両概要
・BYD J6をベースとする自動運転EVバス
・車両前方の障害物・信号灯色を検知し、停止、速度を調整
・高精度三次元地図と3D-LiDARによるセンシング結果を用いて自己位置を推定
実施予定時期
令和6年1月から2月までの間で2週間程度
実施予定箇所
臨海副都心エリア(台場地区等)、中央防波堤内側エリアを回遊するルートを走行
公道②|【テーマ】 マルチモビリティを活用した臨海副都心エリアの回遊性向上、賑わい創出
【プロジェクト実施者】株式会社ティアフォー
実験車両イメージ(タクシー型)

実験車両イメージ(タクシー型)
実験車両イメージ(バス型)

実験車両イメージ(バス型)
主な実施概要・検証内容
本プロジェクトでは、事業性、社会的効果、技術的検証を実施
①事業性
乗り心地、移動の効率化等のサービス性及びビジネスモデルを検証
②技術的検証
周辺施設と連携した回遊性向上に向けた取組みを検証
③社会的効果
想定ルートにおける自動運転車両の導入に係る技術的課題を検証
実験車両概要
・タクシー型自動運転車両とバス型自動運転EV車両
・両車両共に自動運転ソフトウェアであるAutoware※1を搭載し自律判断、走行を制御
・高精度三次元地図と3D-LiDARによるセンシング結果を用いて自己位置を推定
※1 Autowareは The Autoware Foundation の登録商標です
実施予定時期
令和5年12月のうち10日間程度(タクシー型5日間程度、バス型5日間程度)
実施予定箇所
臨海副都心エリア(青海地区等)、中央防波堤内側エリアを回遊するルートを走行
事業に関するお問合せ先
『臨海副都心における自動運転技術を活用したサービスの構築に関するプロジェクト』
受付窓口(日本工営㈱コーポレートコミュニケーション室)
E-mail:c-com@n-koei.co.jp
TEL:03-5276-2454