
"Autonomous Mobility Project in Tokyo Waterfront City for FY2024" will be implemented!
A project to establish services utilizing autonomous driving technology in Tokyo Waterfront City area will be implemented by the business operators selected in 2023.
This year, as in the previous year, we will target both metropolitan-owned land and public roads to identify issues and analyze mobility needs for the commercialization of autonomous driving mobility services, with the aim of promoting the earliest practical application of autonomous driving services. In addition, this fiscal year, in order to allow more people to experience services utilizing autonomous driving technology and to promote its social implementation, we will conduct automated driving projects on metropolitan-owned land and public roads in conjunction with SusHi Tech Tokyo 2024, which will be held mainly in Tokyo Waterfront City.
In addition, we will be accepting applications for participants to test-drive autonomous vehicles for each project.
Service of Symbol Promenade Park Route, Tokyo Waterfront City Circular Route, UMI-no-MORI Route and Autonomous Taxi Route have been finished.
Symbol Promenade Park Route (May 12(Sun.) - June 12(Wed.))
Tokyo Waterfront City Circular Route (April 27(Sat.) - May 26(Sun.))
UMI-no-MORI Route (May 12(Sun.) - May 26(Sun.))
Autonomous Taxi Route (April 27(Sat.) - May 22(Wed.))
Projects
Symbol Promenade Park Route
Project by WILLER and BOLDLY
Image(ARMA)

Image(ARMA)
Image(MiCa)

Image(MiCa)
Project Overview
- Verification of a small, self-driving EV bus that travels around the Symbol Promenade Park
- Verification of operation methods in mixed spaces with pedestrians and vehicles and new business models for implementation of automated driving services
- Verification of efforts to increase social acceptance of automated vehicles by improving circulation in the area
Mobility Information
<ARMA>
- Made by NAVYA(France)
- Fully electric vehicles developed specifically for autonomous driving
- Can run in automatic/manual operation mode
<MiCa>
- Made by Auve Tech (Republic of Estonia)
- Electric vehicles for automated driving
- Can run in automatic/manual operation mode
Verification
- Verification of improved circulation [Business feasibility]
- Verification of business model [Business feasibility]
- Fostering acceptance in mixed spaces with pedestrians and vehicles [Social effects]
Period
May 12(Sun.) - June 12 (Wed.)
*Non-operating day : Mondays and Tuesdays
Area
Inside Symbol Promenade Park
Route
*Mobilities vary depending on the day and location of operation.
<Weekdays>
ARMA : AQUA CITY ODAIBA/Hilton Tokyo Odaiba - Mizu to Hikari no Veil
MiCa : Panasonic Center TOKYO - Mizu to Hikari no Veil
<Weekends>
MiCa : Dream Bridge(Round trip)
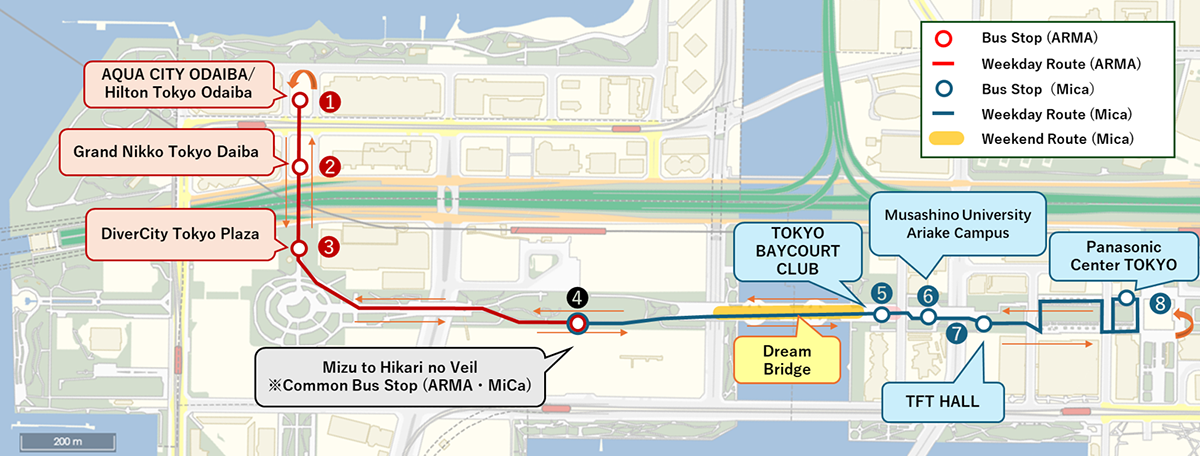
(Click here to enlarge the map)
Tokyo Waterfront City Circular Route
Project by Advanced Smart Mobility
Image (HINO Poncho)

Image (HINO Poncho)
Project Overview
- Verification of the effect of improving circulation by operating autonomous vehicles to connect sections where existing routes are not maintained.
- Verification of the feasibility of services in collaboration with neighboring shopping facilities, such as posting advertising videos inside the cars, and improve customer attraction at major facilities in the area. Examination of the future service models and verification of the business feasibility.
Mobility Information
<HINO Poncho>
- Made by Hino Motors(Japan)
- Equipped with LiDAR, obstacle detection camera, GNSS antenna, etc.
- Autonomous driving using high-precision 3D point clouds, LiDAR, cameras for signal detection, millimeter wave radar, GNSS antennas, etc.
Period
April 27(Sat.) - May 16(Thu.) and May 22(Wed.) - May 26 (Sun.)
*Non-operating day : Mondays and Tuesdays
Area
Kokusai-tenjijo Station - ARIAKE GARDEN - AQUA CITY ODAIBA - Miraikan - CITY CIRCUIT TOKYOBAY
Route
*Mobilities vary depending on the day and location of operation.
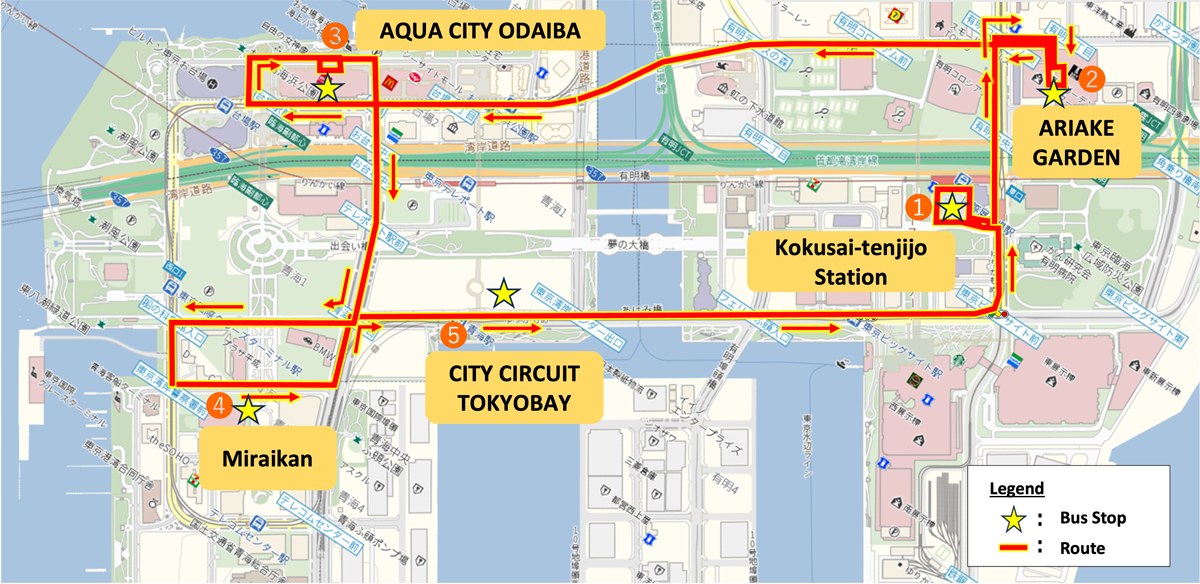
(Click here to enlarge the map)
UMI-no-MORI Route
Project by Advanced Smart Mobility and TIER IV
Image(ERGAmio)

Image(ERGAmio)
Image(Minibus)

Image(Minibus)
Project Overview
- Verification of the effect of improving circulation by running multiple automated buses connecting Kokusai-tenjijo Station - Umi-no-Mori - Miraikan
- Verification of realization and business feasibility of services in collaboration with nearby shopping facilities, such as displaying advertising videos on trains
Mobility Information
<ERGAmio>
- Made by Isuzu(Japan)
- Equipped with LiDAR, obstacle detection camera, GNSS antenna, etc.
- During autonomous driving, the system uses a high-precision 3D point cloud, LiDAR, cameras for signal detection, millimeter wave radar, GNSS antennas, and other devices.
<Minibus>
- Autonomous mobility based on J6(made in Japan)
- Autonomous decision making and driving control with Autoware, autonomous driving software
- Estimation of self-position using high-precision 3D maps and 3D-LiDAR sensing results
Verification
- Identification of mobility needs in the Tokyo Waterfront City
- Identification of issues on the route of autonomous vehicles
- Identification of operational issues for future implementation of unmanned autonomous mobility services
Period
May 12(Sun.) - May 26(Sun.)
*Non-operating day : May 14(Tue.), May 21(Tue.) and May 22(Wed.)
Area
Kokusai-tenjijo Station - UMI-no-MORI - Miraikan
Route

(Click here to enlarge the map)
Autonomous Taxi Route
Project by TIER IV
Image(JPN Taxi)

Image(JPN Taxi)
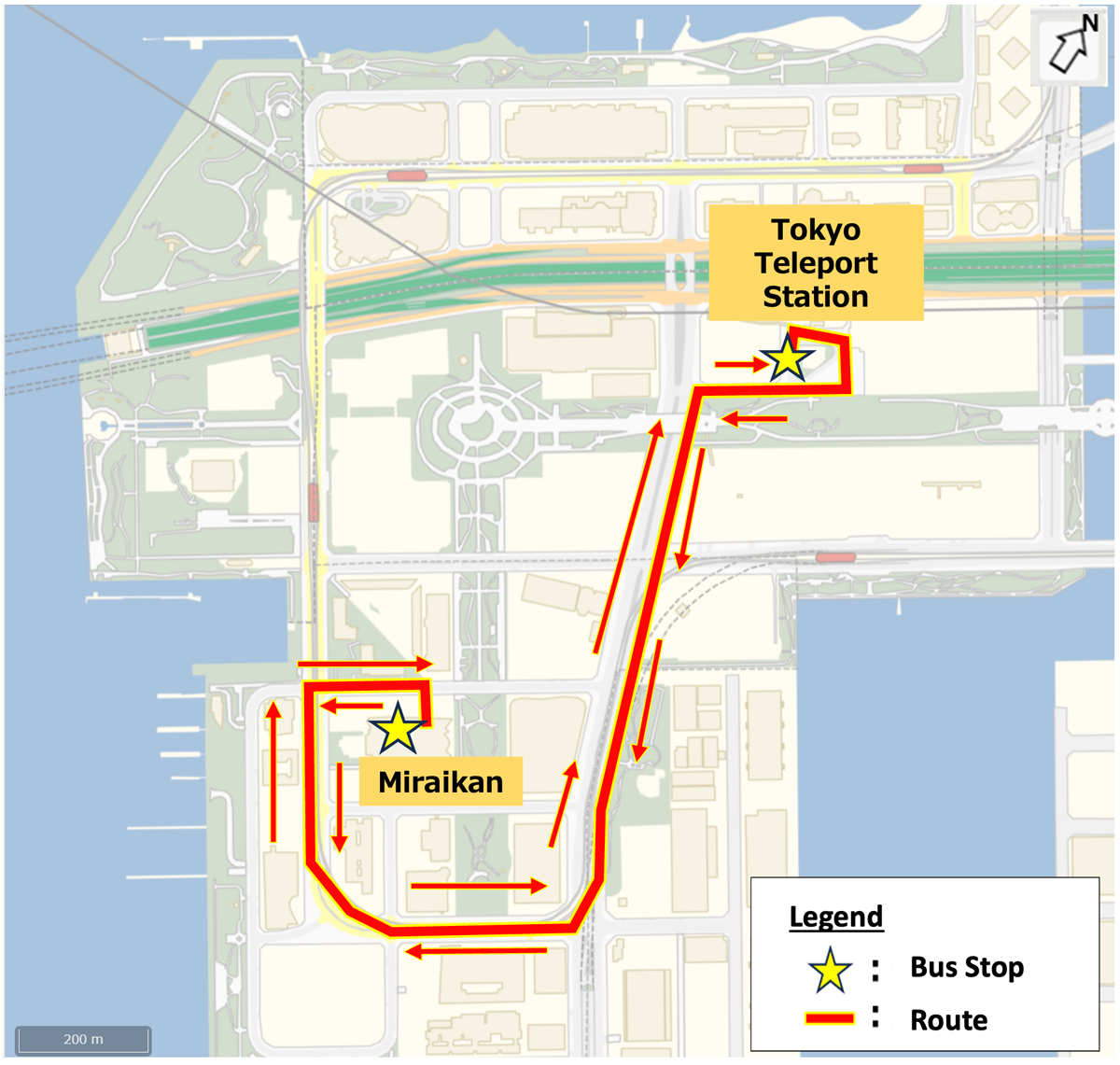
Project Overview
- Verification of a run using an autonomous taxi reservation and dispatch system between Tokyo Teleport Station and Miraikan
- Verification of the effect of operating taxi type vehicles that can handle on-demand transportation for a small number of people on improving the circulation of visitors and creating a lively atmosphere in the area
Mobility Information
<JPN Taxi>
April 27(Sun.) - May 10(Sun.) and May 17(Fri.) - May 22(Wed.) Kokusai-tenjijo Station - Miraikan
(Click here to enlarge the map)
Period
*Non-operating day : Mondays and Tuesdays
Area
Route
For inquiries about our business
Contact point of "Autonomous Mobility Project in Tokyo Waterfront City (FY2024)" is Nippon Koei Co., Ltd. Transportation & Urban Planning Dept.
E-mail : ml-rinkaifukutoshin@dx.n-koei.co.jp
TEL : 070-2820-6836