
『令和6年度 臨海副都心における自動運転技術を活用したサービス構築に関するプロジェクト』を実施します!
臨海副都心エリアにおける自動運転技術を活用したサービス構築に関するプロジェクトを、令和5年度に選定した事業者により、実施いたします。
今年度も昨年度と同様、都有地と公道の両方を対象とし、自動運転移動サービスの事業化に向けた課題の抽出や移動ニーズの分析等を行い、自動運転サービスの早期実用化の促進を目指します。また、今年度は、より多くの方に自動運転技術を活用したサービスを体験いただき、社会実装を促進していくため、臨海副都心を中心に展開されるSusHi Tech Tokyo 2024の開催に合わせ、都有地・公道での自動運転プロジェクトを実施いたします。
また、各プロジェクトへの自動運転車両試乗参加者の募集も行います。
※シンボルプロムナード公園ルート、臨海副都心周回ルート、海の森公園ルート、自動運転タクシールートの参加者募集は終了しました。
【シンボルプロムナード公園ルート】 試乗の参加申し込みはこちら
【臨海副都心周回ルート】 試乗の参加申し込みはこちら
【海の森公園ルート】 試乗の参加申し込みはこちら
【自動運転タクシールート】 試乗の参加申し込みはこちら
実施プロジェクト
シンボルプロムナード公園ルート
【プロジェクト実施者】WILLER株式会社 BOLDLY株式会社
実験車両イメージ(ARMA)

実験車両イメージ(ARMA)
実験車両イメージ(MiCa)

実験車両イメージ(MiCa)
主な実施概要
・シンボルプロムナード公園内を回遊する、小型自動運転EVバスによる走行を検証
・自動運転サービスの実装に向けた歩車混在での運行方法及び新たなビジネスモデルを検証
・エリア内の回遊性を高め、自動運転車両についての社会受容性を高める取組みを検証
実験車両概要
<ARMA>
・NAVYA社(フランス)製
・自動運転専用に開発された完全電気自動車
・自動運転モード/手動運転モードでの走行が可能
<MiCa>
・Auve Tech社(エストニア共和国)製
・自動運転に対応する電気自動車
・自動運転モード/手動運転モードでの走行が可能
検証内容
・回遊性向上の検証【事業性】
・ビジネスモデル検討【事業性】
・歩車混在空間での受容性醸成【社会的効果】
実施時期
2024年5月12日(日)~6月12日(水)
※毎週月曜日・火曜日は運休日です
実施箇所
シンボルプロムナード公園内
走行ルート
※運行日・箇所により車両が異なります
<平日>
ARMA:アクアシティお台場・ヒルトン東京お台場前~光と水のベール前
MiCa:パナソニックセンター東京前~光と水のベール前
<休日>
MiCa:夢の大橋(往復運行)

(クリックで拡大)
臨海副都心周回ルート
【プロジェクト実施者】先進モビリティ株式会社
実験車両イメージ(ポンチョ)

実験車両イメージ(ポンチョ)
主な実施概要
・既存路線が整備されていない区間をつなぐ自動運転車両の運行による回遊性向上効果を検証
・車内への広告動画掲出等近隣商店施設と連携したサービスの実現性可能性を検証するとともに、エリア内の主要施設の集客向上を図る。将来的なサービスモデルを検討し、事業性を検証
実験車両概要
<ポンチョ>
・日野自動車社(日本)製
・LiDAR、障害物検知カメラ、GNSSアンテナ等を搭載
・自動運転時には、高精度3次元点群とLiDAR、信号検出用カメラ、ミリ波レーダ、GNSSアンテナ等を使用して走行
実施時期
2024年4月27日(土)~5月16日(木)、5月22日(水)~5月26日(日)
※毎週月曜日、火曜日は運休日です
実施箇所
国際展示場駅~有明ガーデン~アクアシティお台場~日本科学未来館~シティサーキット東京ベイ
走行ルート
※運行日により走行箇所が異なります
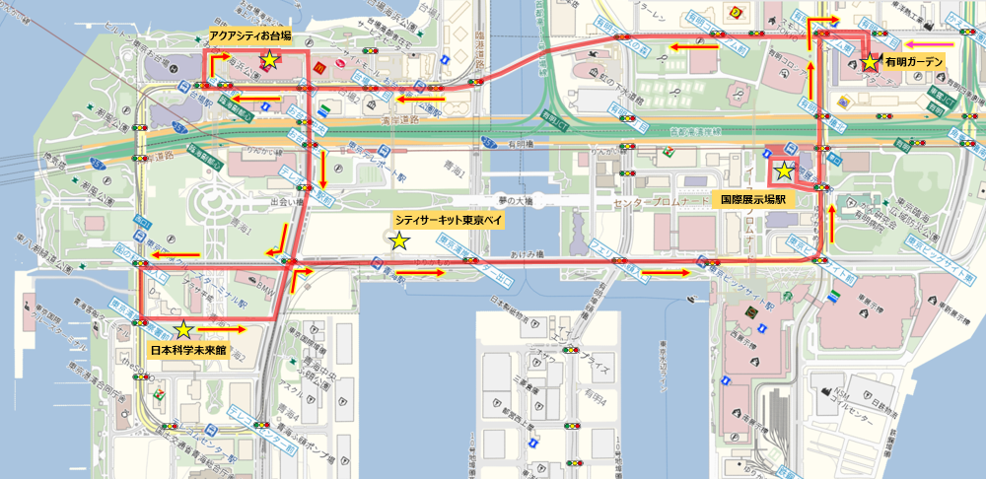
(クリックで拡大)
海の森公園経由ルート
【プロジェクト実施者】先進モビリティ株式会社 株式会社ティアフォー
実験車両イメージ(エルガミオ)

実験車両イメージ(エルガミオ)
実験車両イメージ(mini bus)

実験車両イメージ(mini bus)
主な実施概要
・国際展示場駅~海の森公園~日本科学未来館をつなぐ複数の自動運転バスの走行による回遊性向上の効果を検証
・車内への広告動画掲出等近隣商店施設と連携したサービスの実現性可能性及び事業性を検証
実験車両概要
<エルガミオ>
・いすゞ自動車(日本)製
・LiDAR、障害物検知カメラ、GNSSアンテナ等を搭載
・自動運転時には、高精度3次元点群とLiDAR、信号検出用カメラ、ミリ波レーダ、GNSSアンテナ等を使用して走行
<mini bus>
・J6をベース車両とした自動運転化車両(日本製)
・自動運転ソフトウェアであるAutowareを搭載し自律判断、走行を制御
・高精度三次元地図と3D-LiDARによるセンシング結果を用いて自己位置を推定
検証内容
・臨海副都心エリアにおける移動ニーズの把握
・自動運転車両走行ルート上の課題抽出
・将来的な無人自動運転移動サービスの実装に向けた運用上の課題抽出
実施時期
2024年5月12日(日)~5月26日(日)
※5月14日(火)、21日(火)、22日(水)は運休日です。
実施箇所
国際展示場駅~海の森公園~日本科学未来館
走行ルート

(クリックで拡大)
自動運転タクシールート
【プロジェクト実施者】株式会社ティアフォー
実験車両イメージ(JPN Taxi)

実験車両イメージ(JPN Taxi)
主な実施概要・検証内容
・東京テレポート駅と日本科学未来館の2拠点間をつなぐ、自動運転タクシーによる予約配車システムを用いた走行を検証
・少人数でのオンデマンドの輸送に対応するタクシータイプ車両の運行による来訪者の回遊性向上、エリア内の賑わい創出に対する効果を検証
実験車両概要
<JPN Taxi>
・TOYOTA社(日本)製
・自動運転ソフトウェアであるAutowareを搭載し自律判断、走行を制御
・高精度三次元地図と3D-LiDARによるセンシング結果を用いて自己位置を推定
実施時期
2024年4月27日(土)~5月10日(金)5月17日(金)~5月22日(水)
※毎週月曜日・火曜日は運休日です。
実施箇所
東京テレポート駅~日本科学未来館
走行ルート

(クリックで拡大)
事業に関するお問合せ先
『臨海副都心における自動運転技術を活用したサービスの構築に関するプロジェクト』
受付窓口(日本工営㈱交通都市部)
E-mail:ml-rinkaifukutoshin@dx.n-koei.co.jp
TEL:070-2820-6836